This website is no longer maintained. New content has moved to www.zongyaojin.com. This site may become unavailable in the future.
Ph.D. Research on Shared Control of Construction Robots
Aug 1, 2020
|
Tech
Demo
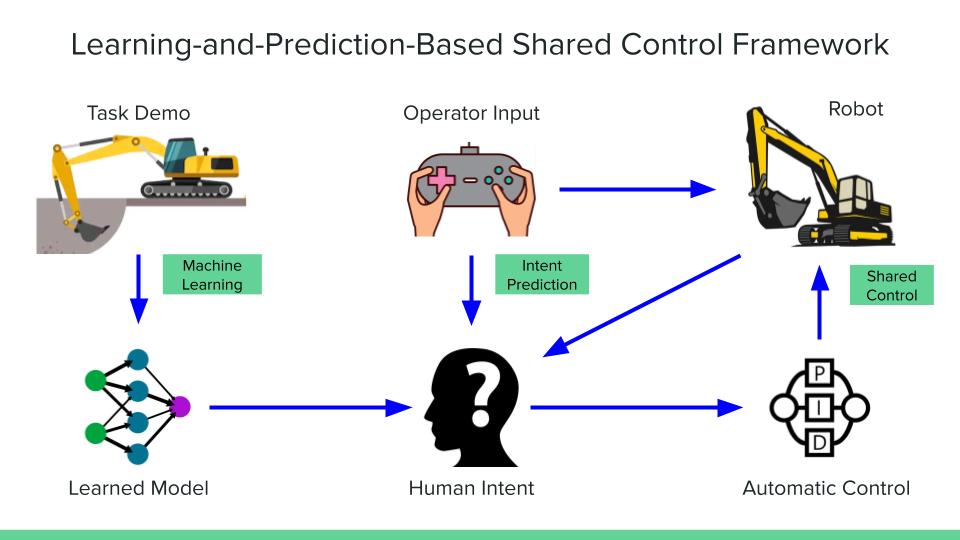
Research funded by NFS grant 1527828, mainly focused on making construction machines more intelligent and collaborative so that they don't require significant skills and training (due to human labor shortage) to operate. Proposed the following methods to address such challenges: (1) learning a task from demonstration, (2) predicting human operator intent, (3) sharing control authority between human and autonomy, (4) adjusting the learned task model . Below is a brief visual illustration of the concepts, framework, hardware and software systems, and some experimental results. For details, see 2021@Jin , 2022@Jin , and 2021-2@Jin .
Demo 1: Problem to solve
Demo 2: Proposed framework

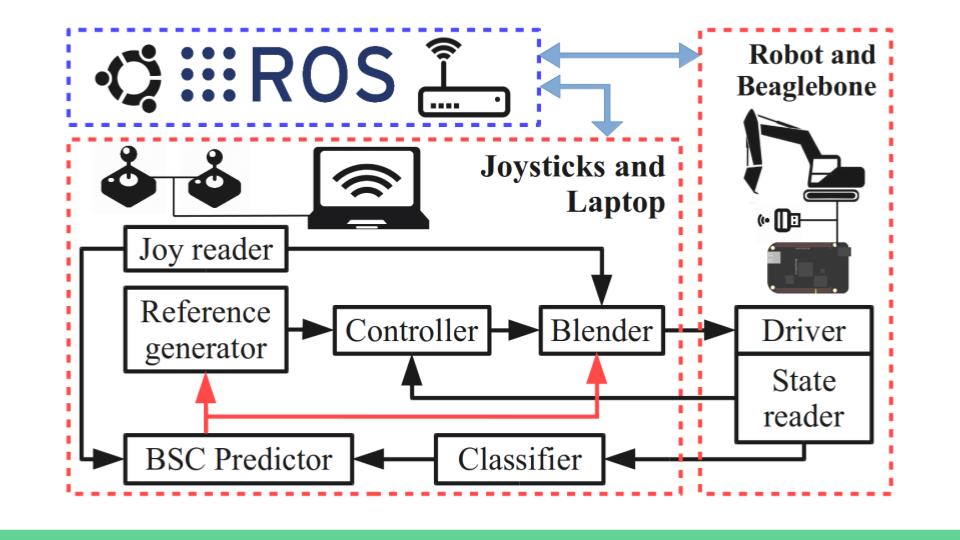
Demo 3: Experimental setup
Demo 4: Concept of subgoal

Demo 5: System components
Demo 6: Software architecture

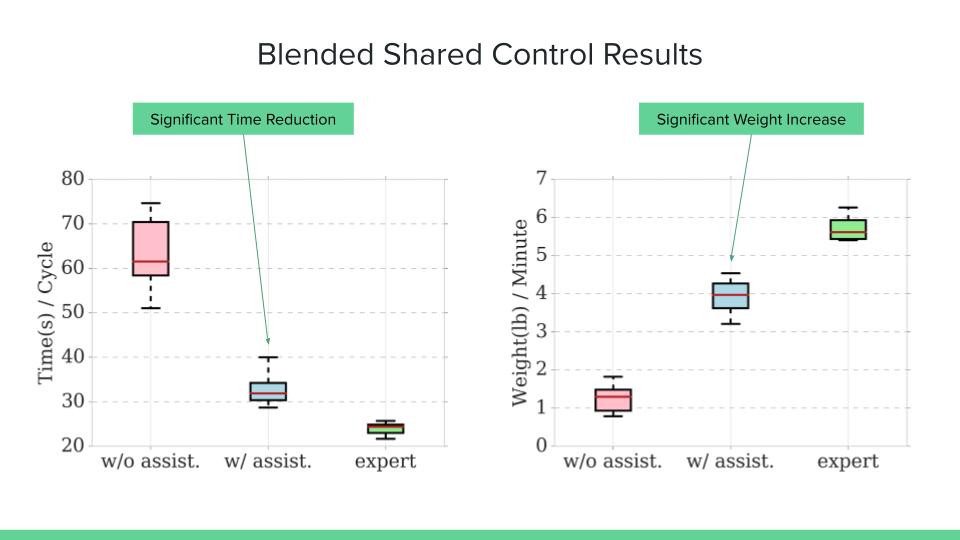
Demo 7: Shared control experimental results
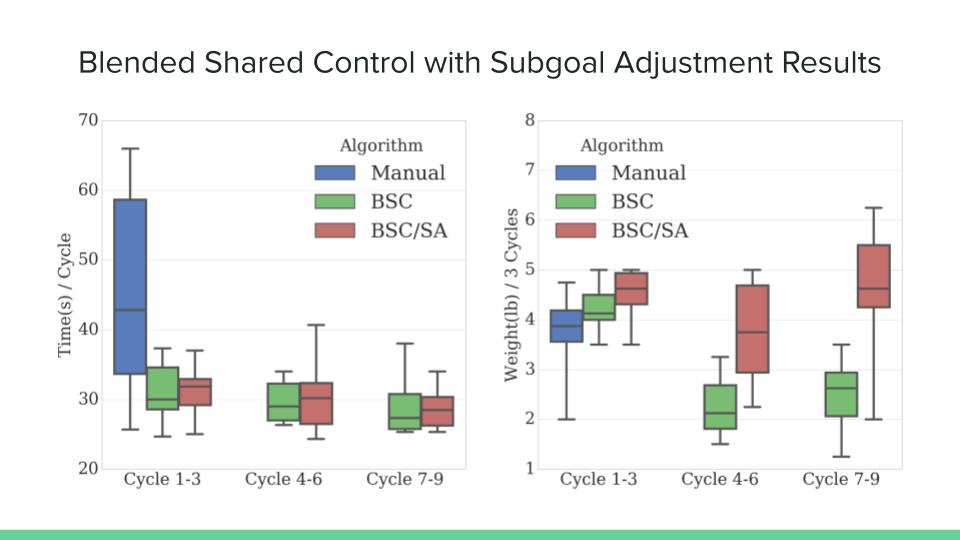
Demo 8: Shared control with subgoal adjustment experimental results
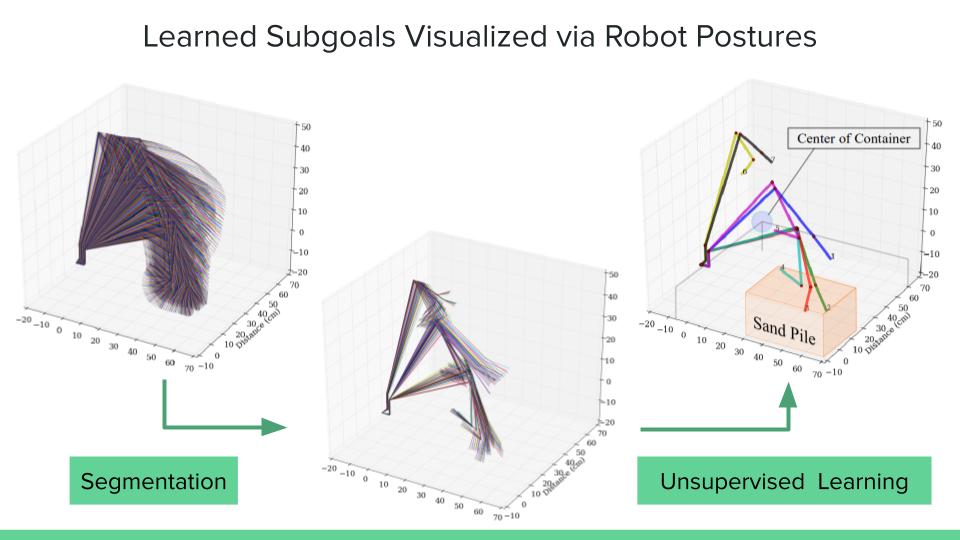
Demo 9: Subgoal learning
Demo 10: Subgoal clusters explained

Demo 11: Dynamic intent prediction
Demo 12: Empirical intent prediction


Demo 13: Intent prediction synthesis
Demo 14: Empirical transition update law


Demo 15: Transition matrix row evolution
Demo 16: Transition matrix convergence

